






 史上最大参与规模的 ICRA, 具身智能的学术盛宴
史上最大参与规模的 ICRA, 具身智能的学术盛宴
5 月 13 日至 17 日,机器人自动化领域顶级学术盛会 ICRA(国际机器人与自动化大会)在日本横滨召开。ICRA 由电气电子工程师学会(IEEE)机器人与自动化学会(RAS)主办,自 1984 年开始每年举办一次。ICRA 在学术界的地位非常高,从参与规模和学术影响力上都是最有影响力的顶级国际学术会议。在谷歌学术指标(Google Scholar Metrics, GSM)中常年位居机器人学刊物影响力评定第一,2024 年 ICRA 的现场参会人数更是超过 6000 人,是历史上规模最大的会议之一。此次 ICRA 现场,能看到许多新创具身智能公司和顶级科研团队的身影,令人惊喜的是,此次 ICRA 现场许多团队展示了 Live Demo。其中,来自洛杉矶的Westwood Robotics(西木科技)在进行现场演示时备受关注。Westwood Robotics 曾经发售明星产品小型人形机器人开放平台 BRUCE,此次是带着全比例人形机器人 THEMIS 初次亮相,吸引了现场的学者及其他参会者围观。发源于 RoMeLa 实验室,华人领衔
Westwood Robotics(西木科技)是一家成立于 2018 年的美国公司,总部位于洛杉矶。公司的创始团队成员主要来自加州大学洛杉矶分校的 Robotics & Mechanisms Laboratory 实验室(RoMeLa)。RoMeLa 实验室在学术界的地位非常显著,由著名的机器人学教授 Dennis Hong 创立和领导。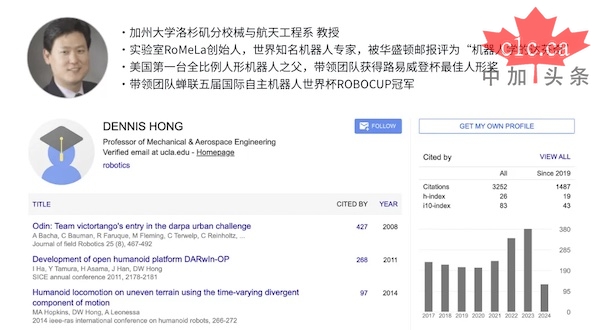
,时长00:18
(BRUCE早在 2021年仍处于研发验样机阶段,即可实现各种跳跃动作)
全尺寸人形机器人,THEMIS 首次亮相本次 Westwood Robotics 带着全尺寸人形机器人 THEMIS 亮相 ICRA,同时也是 THEMIS 第一次面向公众展示。THEMIS 身高 1.65 米,重量仅约 30 kg,全身使用碳纤维和航空铝合金复合结构,配合出色的深仿生拓扑优化设计以及轻量化驱动模组。
THEMIS 的每条腿有 6 个自由度,全部采用了 Westwood Robotics 的 BEAR 系列本体感知驱动器,而其中腿上的两个格外醒目的 Pitch 关节所使用的 Kodiak BEAR 驱动器可以瞬时爆发出超过 300 Nm 的强大输出,单个驱动器的瞬时输出功率最高可达 3 千瓦。结合轻量化、低惯量的腿部结构设计,THEMIS 可以实现接近 2 m/s 的最高步行速度和最快 10 km/h 的奔跑速度。位于 THEMIS 臀部的 8 个主要驱动器全部接入液态冷却,由 Westwood Robotics 自研的专用压力泵完成冷却水循环,保障驱动器的全力输出和爆发性能。THEMIS 的每条手臂拥有 4 个自由度,同样采用了 BEAR 系列驱动器来保证动态操作能力,同时,轻量化的碳纤维手臂结构搭配 BEAR 驱动器出色的驱动透明度,为机械臂操作过程中的力矩控制与感知以及碰撞检测等安全保障功能提供坚实的底层支持。最高搭载 200 TOPS 算力搭配立体相机,支持感知和导航除了星战风格的全碳纤维身体,THEMIS 头部的两颗明亮的“大眼睛”也格外引人注目。
THEMIS 的身体的前部和背部都可搭载双目立体相机,并搭配独立的额外 100 TPOS 算力视觉处理单元,对 0.15~5 m 范围内的近场环境信息进行处理,对 THEMIS 的自主导航、和移动避障提供更精细的环境信息,并帮助 THEMIS 在复杂环境下完成精细落脚点规划。据悉,WR 团队已经在开展 THEMIS 人形机器人在针对应用场景中的各类目标识别与操作等任务,基于深度学习并结合多模态模型进行相关功能的开发工作。经典控制算法强大的 locomotion 是基石。和现在大多数采用机器学习方法来实现双足移动的国内人形机器人公司不同,WR 团队拥有坚实的经典控制算法实力。WR 团队引领和维护的BRUCE小型人形机器人开放平台就是使用 MPC+WBC 的经典控制算法实现,是目前世界上最先进的高动态小型人形机器人系统。基于经典算法的运动控制方法有很多明显优势,比如数据透明,模型可解释性强,机器人系统具有更高得可控制性,泛化能力强等。
定位商业应用,已与美国客户达成合作
THEMIS 与 BRUCE 共享底层系统架构,可以一同成为科研工作者的科研利器。尝试性的前期科研工作,可在完全开源的 BRUCE 上展开,让开发工作安全、高效、简单、低成本。有明确的可靠方案后,支持轻松迁移到 THEMIS 进行实现,快速放大科研产出。据悉,THEMIS 定位为商业应用产品,目标是通用场景下的各类具体操作任务Westwood Robotics 团队已经为其全比例人形机器人找到包括娱乐、医疗、生化等几个落地场景,并正在推进与美国本土客户的合作与商业落地。
来源:
声明:该文观点仅代表作者本人,中加头条系信息发布平台,我们仅提供信息存储空间服务。




发表评论 取消回复